PD Dr. Manuela Schmidt
Institute of Zoology and Evolutionary Research


PD Dr. Manuela Schmidt
Image: Manuela SchmidtPosition: Akademische Rätin
Curator of the collections of the Phyletisches Museum
Institute of Zoology and Evolutionary Research
Erbertstrasse 1
07743 Jena
Phone: +49 3641 949188
Email: schmidt.manuela@uni-jena.de
As functional and evolutionary morphologist the fundamental interest of my research is to understand evolutionary transformations in biological systems. The particular focus of my research is directed to the motion system of mammals. I want to understand how adaptive changes in form-function relationships arose against the background of phylogenetic heritage and evolutionary constraints.
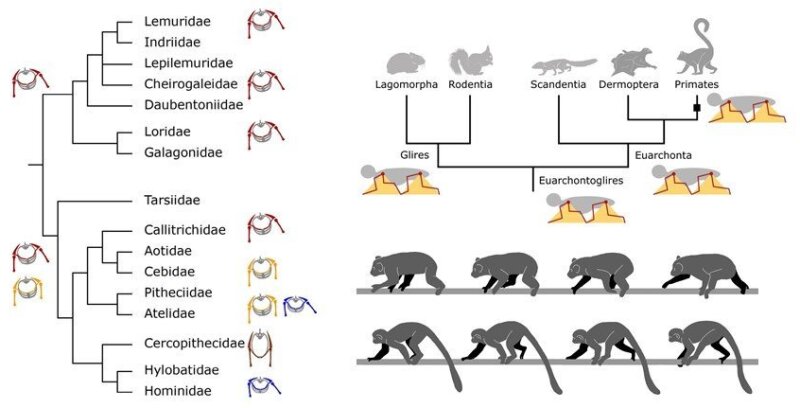
Evolutionary transformations in Primates: shoulder mobility, footfall patterns, limb geometry
Illustration: Manuela SchmidtSmall mammals have a particularly versatile movement repertoire. We examine walking on straight and inclined surfaces, on narrow branches and on uneven ground. The analysis of climbing and jumping requires a particularly good preparation of the animals and experimental situations.
Biplanar X-ray fluoroscopy allows a view of the moving structures beneath the fur. Force-sensitive plates determine the forces when running and jumping with high precision.
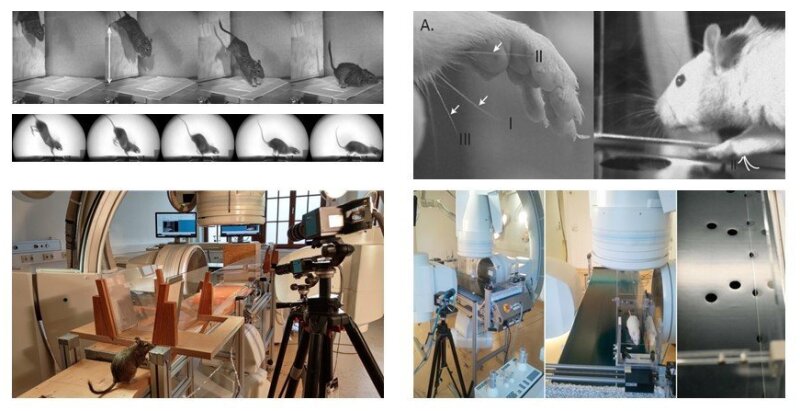
Experimental situations in the motion lab
Illustration: Manuela SchmidtOur research and the quality of our data is largely determined by the cooperation of and with animals. Our projects are designed in such a way that the animals do not experience any suffering or pain. We invest a lot of time and patience in the habituation to minimize stress. All people involved in the projects have the required expertise and undergo regular further training. We also share our experiences, e.g. about the advantages of clicker training, in lectures and publications.
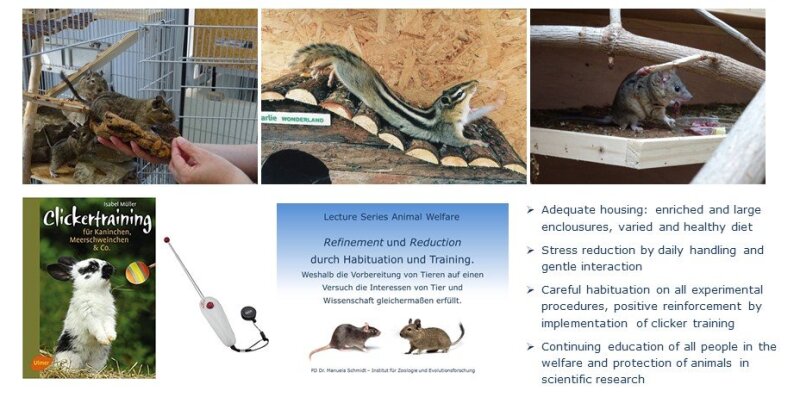
Measures to maintain animal welfare
Illustration: Manuela Schmidt
Capacity of multi-tasking in motion systems
Illustration: Manuela SchmidtBackground: The vast majority of mammals has a broad repertoire of locomotor modes. Instead of being excellent in one special discipline, mammals having a so-called generalist phenotype can run and jump, climb and burrow, many can swim. In performing these activities, they are not perfect but good enough to cope with the daily challenges in their natural environment. So, multifunctionality guarantees survival in an ever changing world and ensures long-term evolutionary success.
Questions: We are interested in understanding the functional background of this strategy. How do such mammals adjust the biomechanics of their motor activities to achieve performance, how do they gain running speed, how do they jump upwards and downwards or how do they balance on narrow substrate?
Locomotion is not all that ensures survival. Since mammals have had fur, they have also had parasites. Personal hygiene is essential for survival. It not only protects against pathogens transmitted by parasites, but also maintains the functioning of important senses such as hearing and the sense of touch, among others. Body care plays a major role in thermoregulation and social interactions of all kinds. No wonder many species invest more time in daily body care than in other activities.
Chipmunks (Tamias sibiricus, Sciuridae) spend a lot of time on daily grooming. By analyzing the spatio-temporal structure of these grooming sequences, we learn which body area is cleaned particularly intensively, which areas are neglected, and how the animals prefer to clean themselves (oral grooming, scratching, "washing" with forepaws).
Involved students:
B.Sc. Celina Richter, M.Sc. Julia van Beesel, M.Sc. Janina Weber
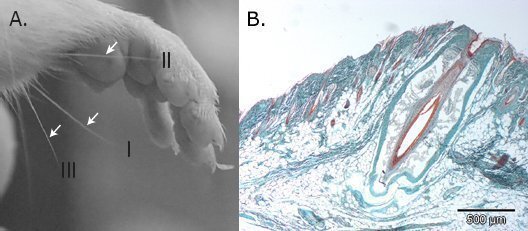
A. Carpal sinus hairs on the rat's forepaw. B. Longitudinal section of the follicle-sinus-complex.
Image: Sandra Niederschuh, Manuela SchmidtMany small-sized mammals have three or more sinus hairs near the wrist joint of the forelimb, called “carpal vibrissae”. Sandra Niederschuh in her Doctoral thesis project investigates the function of these hairs as feedback sensors during locomotion. She analysed the effect of removal of these hairs (they regenerate within two weeks) on limb kinematics and body posture.
Our biological perspective on carpal vibrissae is embedded in a collaborative project with engineers and scientists of the Technical University Ilmenau. Together, we explore how technical solutions for lever-based mechanosensors can be realized according to the function of vibrissae.
Project partners:
Funding:
German Research Foundation (2013, 2015): Technical, non-visual characterization of substrate contacts using carpal vibrissae as a biological model.
Behavioural and performance analyses become of increasing importance as diagnostic tools in preclinical medical research and genetics. But, linking anatomy and physiology with behaviour and performance is difficult because of individual variation and flexibility in the latter. The analysis of motion principles e.g. the footfall patterns of gaits, the measures of speed changes, limb and body kinematics or substrate reaction forces in animal models for diseases or in mutants has the potential to explain observed differences in performance and behaviour between treated and control individuals.
Evolutionary morphology also profit from such studies by learning much about intraspecific physiological and functional plasticity of the motion system, about morphological integration and about the ability to compensate for a lesion in the central nervous system, for a dysfunction of a certain joint or for an genetic aberration.
Projects and funding:
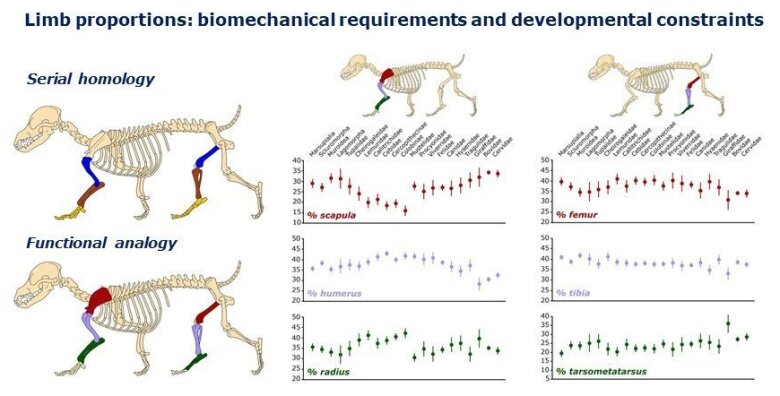
Morphological integration: Limb proportions of mammals
Graphic: Manuela SchmidtDuring mammalian evolution, fore- and hindlimbs underwent a fundamental reorganization in the transformation from the sprawled to the parasagittal condition. This caused a dissociation between serial and functional homologues. The mobilized scapula functions as the new proximal forelimb element and is functionally analogous to the femur of the hindlimb. Tarsus and metatarsus built a new functional hindlimb element that is functionally analogous to the forearm of the forelimb. Morphological covariation between serially homologous fore- and hindlimb elements can conflict with biomechanical demands when certain intralimb proportions are required for the postural stability of motion.
In our studies we found a clear relationship between the proportions of the first and the third elements of each limb, while the middle element is less involved in alterations of intralimb proportions. Hindlimb proportions are largely uniform across mammals and correspond to biomechanical predictions regarding postural stability. The greater variability in forelimb proportion is likely be the expression of various adaptations but might results also from constraints due to the shared developmental programs with the hindlimb.
Project partners:
Funding:
Promotion of excellent scientific activities at Thuringian universities (2005 - 2010): Junior research group "Functional morphology of motion systems".
German Research Foundation (2006-2009): Body size related strategies in the self-stability of limb motion. (Fischer & Schmidt)
Inhalt
Projektförderung:
DFG Projekt (2005 - 2008): Verteiling der Muskelfasertypen in der Schultermuskulatur arborealer Primaten in Relation zu Schulterbewegung und Belastung.
Book chapters, monographs and key research papers
Image: Manuela Schmidt